Ship to:
France
Select the desired shipping method
- Shipping Company Estimated Delivery Time Shipping Cost



ไฮไลท์
- ใช้งานง่าย
- เพิ่มวงจรกรองสัญญาณให้คงที่
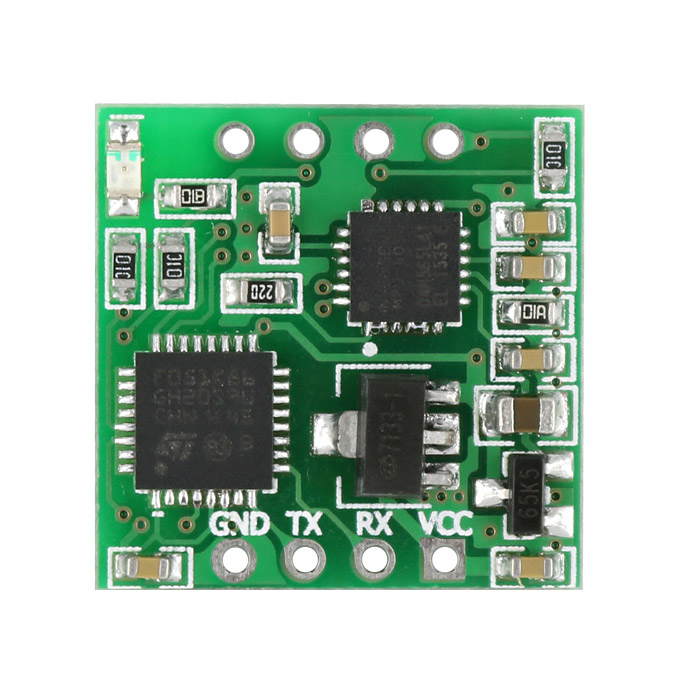
- โมดูลใช้เครื่องวัดการหมุนวน / accelerometers MPU6050 ความละเอียดสูงและโปรเซสเซอร์ STM32 ที่มีประสิทธิภาพ STM32 อ่านข้อมูลการวัดจาก MPU6050 แล้วส่งออกผ่านพอร์ต UART แบบอนุกรมเพื่อหลีกเลี่ยงผู้ใช้เขียนขั้นตอนที่ซับซ้อนสำหรับ MPU6050
- โมดูลนี้ใช้เทคนิคการกรองแบบดิจิตอลขั้นสูง (Kalman filter) ซึ่งสามารถลดเสียงรบกวนในการวัดและเพิ่มความแม่นยำในการวัดได้อย่างมีประสิทธิภาพ ประกอบด้วยเครื่องยนต์ DMP ซึ่งได้รับ quaternion เพื่อให้ได้ทัศนคติในปัจจุบัน ความถูกต้องของการวัดความสูงคือระดับ 0.01 และมีเสถียรภาพสูง
สเปค
| General | |
|---|---|
| ชนิดภาพเขียน | โมดูล Gyroscope |
|
การเชื่อมต่อข้อมูล |
Serial (ระดับ TTL), I2C (เชื่อมต่อโดยตรงกับ MPU6050 และไม่มีเอาต์พุตท่าที) |
| อัตราการรับส่งข้อมูล | 115200bps หรือ 9600bps |
| รูปแบบการสื่อสารแบบอนุกรม | 8N1 |
| แรงดันไฟฟ้าในการใช้งาน | 3.3V - 6VDC (ตัวควบคุม 3.3V บนเครื่องบิน) |
|
ปัจจุบันการดำเนินงาน |
10mA (สูงสุด) |
| แรงดันลอจิก | ระดับสูงคือ 3.3V ระดับต่ำคือ 0-0.3V |
| Pin Pitch | 2.54mm |
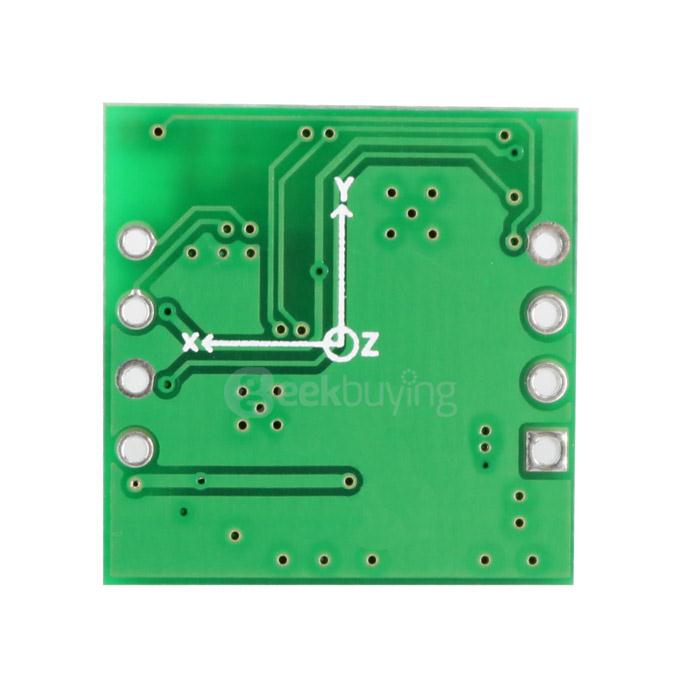
| การวัด | มิติข้อมูลการวัด: การเร่ง: 3D, ความเร็วเชิงมุม: 3D, มุมของทัศนคติ: 3D ช่วง: Acceleration: ± 16g, Angular Speed: ± 2000 ° / s ความละเอียด: Acceleration: 6.1e-5g, Angular Speed: 7.6e-3 ° / s ความเสถียร: การเร่งความเร็ว: 0.01g ความเร็วเชิงมุม: 0.05 ° / s |
| บรรจุภัณฑ์ | |
| 1 x ซีพียู Accelerometer ซีรี่ส์ 6 ซีรี่ส์ Sensor | |


รูปถ่ายลูกค้า
วิดีโอลูกค้า
ความคิดเห็นของลูกค้า
| 5 ดาว | 0 | |
| 4 ดาว | 0 | |
| 3 ดาว | 0 | |
| 2 ดาว | 0 | |
| 1 ดาว | 0 |
แสดงความคิดเห็น
- ทั้งหมด (0)
- รูปภาพ (0)
- วิดีโอ (0)